ヒューマノイド向けロボット台車の開発サービス
ロボット台車
Mobile Base for Humanoid Robots


「足回り」は、任せる。
フィジカルAIへの取り組みを加速させる、高可搬・長ストロークのセミオーダー型ベース筐体
本サービスは、ヒューマノイド(双腕型ロボット)を開発する企業・研究者のための、移動プラットフォーム開発サービスです。 全方向移動が可能なメカナムホイールと、床面からのピックアップを可能にする1,000mmの長ストロークリフトを統合。 AIRoA(一般社団法人AIロボット協会)が提唱するロボット基盤モデル開発用データの収集に最適な仕様となっており、各社が保有する双腕ロボットに合わせて最適なカスタマイズを施した状態で提供します。
特長
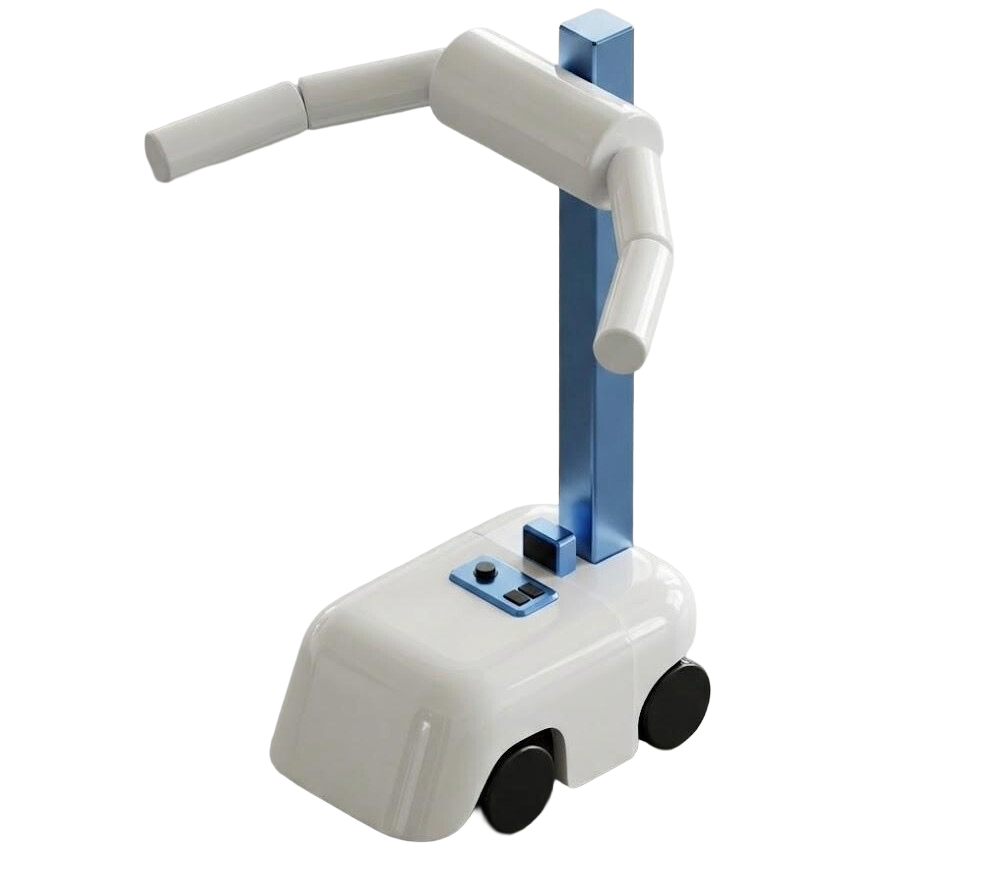
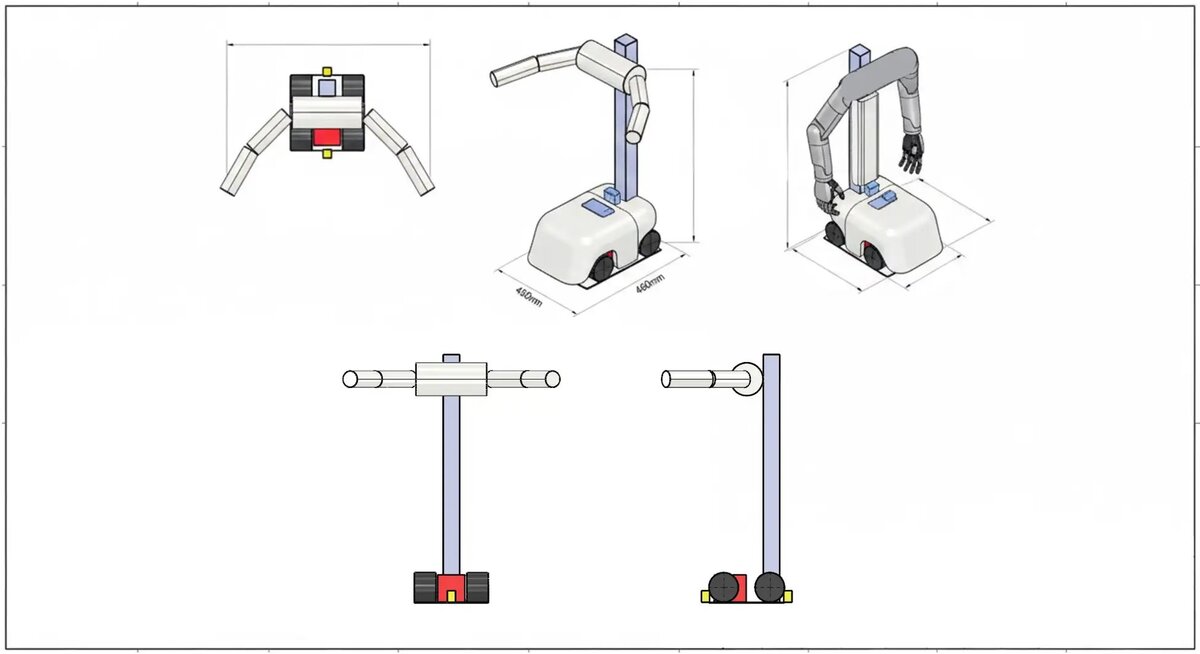 ※初回商談後の構想壁打ちイメージ図
※初回商談後の構想壁打ちイメージ図
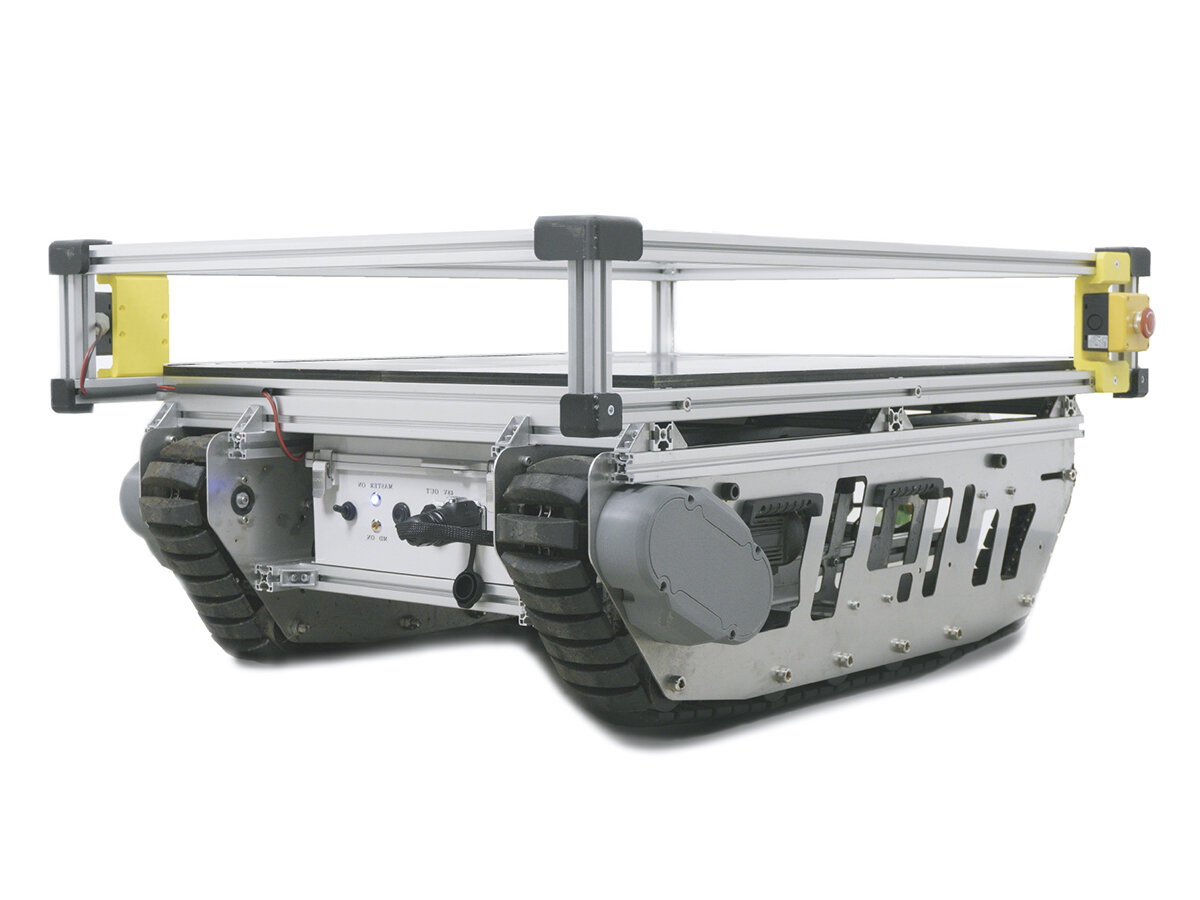
1. 狭小環境でも自在に動ける「四輪メカナム駆動」
前後・左右・斜め・その場旋回が可能なメカナムホイールを採用。 日本の住環境や倉庫内の狭い通路でも、ヒューマノイドがスムーズに、かつ緻密に移動することを可能にします。
2. 床面から高さ1.4mまで届く「1000mmリフト」
最大1,000mmの昇降ストローク(地上高400mm〜1400mm)を実現。 床面にある物のピックアップから、高い棚へのアプローチまで、ロボットの作業範囲を劇的に広げます。
3. 各社のロボットに合わせた「セミオーダー設計」
提供範囲は「車両本体+リフター+モーター+ドライバ」までをパッケージ化。 搭載する双腕ロボットの重量や重心、通信環境に合わせて、機構の設計変更が可能です。これにより、開発者はコアとなるAIやマニピュレーションの開発にリソースを集中させることができます。
 |
 |
仕様
【標準スペック例】
※本サービスは開発サービスのため、ご要望に合わせて調整が可能です。
| 項目 | 仕様 |
| 本体サイズ (W/L/H) | 450 × 460 × 1450 (mm) |
| 全体可搬重量 | 300kg(自重を含む) |
| リフト部可搬重量 | 20kg |
| リフトストローク | 1000mm(地上高400mm〜1400mm) |
| ステアリング方式 | 四輪駆動メカナムホイール |
| 最高速度 | 2.75km/h |
| バッテリー | 600Wh(リン酸鉄リチウム電池 Lifepo4) |
| 通信プロトコル | CANopen / RS485 Modbus RTU |
| 足回り機能 | 四輪サスペンション搭載・防雨対応 |
【開発・導入の流れ】
-
1.ヒアリング: 搭載予定のロボット仕様、用途、通信環境等を確認。
-
2.構想設計: お客様のプロジェクトに最適な仕様を提案(構想壁打ち)。
-
3.試作・製造: セミオーダー形式でスピーディーに開発。
-
4.納品: 制御用SDKの提供やインテグレーション支援も対応可能です。
購入先
製品の導入検討、お見積り依頼は以下よりお気軽にお問い合わせください。
それぞれのプロジェクトに合わせて、最適な設計をご提案させていただきます。
ご相談は お問い合わせフォームをご利用ください。
お問い合わせフォームへ →