製品情報
2023.08.25
「ROS開発キット」開発レポート つくばチャレンジに参加します!

こんにちは。ロボティクスエンジニアの吉田です。
CuboRexでは、CuGoを使い自律ロボットを簡単に開発できるパッケージとしてROS開発キットを販売しております。弊社ではこのROS開発キットを使用した開発例の提案として、つくばチャレンジ2023に出場するプロジェクトを進めております。
このプロジェクトを通して弊社でCuGoを使った自律移動ロボットを開発する様子を、ROS開発キット開発レポートとして紹介していこうと思います。屋外での自律ロボット開発を検討されている方や、ROSを使ったロボットの開発に興味がある方はぜひご覧いただければと思います。

初回の本記事ではプロジェクトの概要と、07/15(土)に開催されたつくばチャレンジ実験走行会の様子をご紹介します。
※つくばチャレンジの詳細はつくばチャレンジ2023の公式サイトをご参照ください。
※ROS開発キットの詳細はPR TIMES様の記事をご参照ください。
つくばチャレンジとは?
つくばチャレンジとは、つくば市で行われる自律移動ロボットの研究を目的とした技術チャレンジです。実際に人が生活している都市の中をロボットが走行する貴重な実証実験の場として2007より毎年開催されており、数々の大学や企業が参加されています。2023年のつくばチャレンジでは7月から11月にかけて実験走行会を行い、11/19に本走行会が実施されます。
参加の目的
前述の通り、CuboRexではクローラを使ったロボット開発キットとしてROS開発キットを発売しております。この製品は”ハードウェアを気にせず、いきなりソフト開発ができる!”をコンセプトとして、多くのお客様にご利用いただけるようソフトウエアの開発を進めております。今回のつくばチャレンジへの参加は、下記2点を検証することが主な目的となっています。
- どのような装備があれば実際に人が生活する空間を自律走行できるのか
- どのようなアルゴリズムを用意すれば屋外での自律走行を実現できるか
つくばチャレンジで得られたノウハウはこのニュースでご報告するとともに、実際に使用したソフトウェアもCuboRexのGitHubで公開する予定です。こちらも、ぜひロボット開発にご活用ください。
CuboRexの作戦
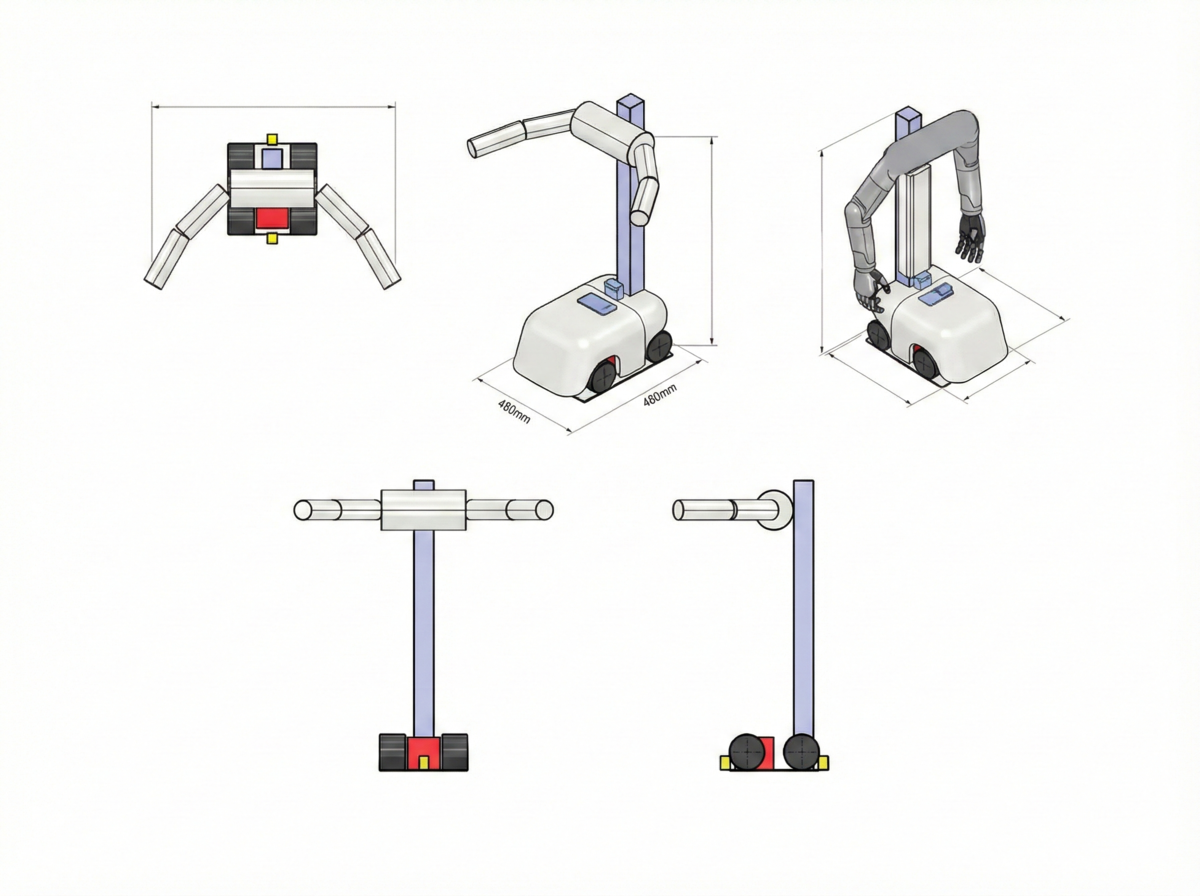
ROS開発キットを使用した自律走行には、以下のセンサを使用します。
- エンコーダ
- 2D LIDAR
- IMU
- GNSS アンテナ ※
- デプスカメラ ※
※印の記載があるセンサは、ROS開発キットに標準搭載されておりません。
各々のセンサの詳細は下記の記事でも紹介しておりますので、詳細を知りたい方はこちらも併せてご覧ください。
「クローラロボットでSLAM! Cartographerで地図を作ってみた」
今回使用するGNSSアンテナと受信モジュールは、準天頂衛星システム「みちびき」の測位補強サービス(CLAS)を使うことで数cmの精度で測位することができます。実際には屋根等の電波が遮られる環境では精度を維持することが難しいのですが、つくばチャレンジの課題コースでは周囲に電波を遮るものが少なく、おおむね良好なデータが取れています。(下記の記事でご紹介したGNSSのデータも、つくばチャレンジの実験走行で取得したデータになります。)
「様々なセンサーを取付けて自律走行可能!! ~「ROS開発キット」のご紹介 ~」
そのため、今回のつくばチャレンジでは、それぞれのセンサの役割分担を下記の通りに設定して自律走行を行います。
- GNSS:自己位置推定の主力なセンサとして利用する
- エンコーダ・IMU:GNSSの測位による自己位置推定の補助をする
- LIDAR・デプスカメラ:通行人や障害物を検出する
以上のシステムは、工事現場や農地などといった”重いものを運ぶ現場”で適用しやすいシステムを想定しています。不整地での走行を強みとしたCuGoとの相性も良く応用できる環境も多いかと思いますので、走行アプリケーションも汎用性が高くできるよう開発を進めていこうと考えています。

実験走行会の様子
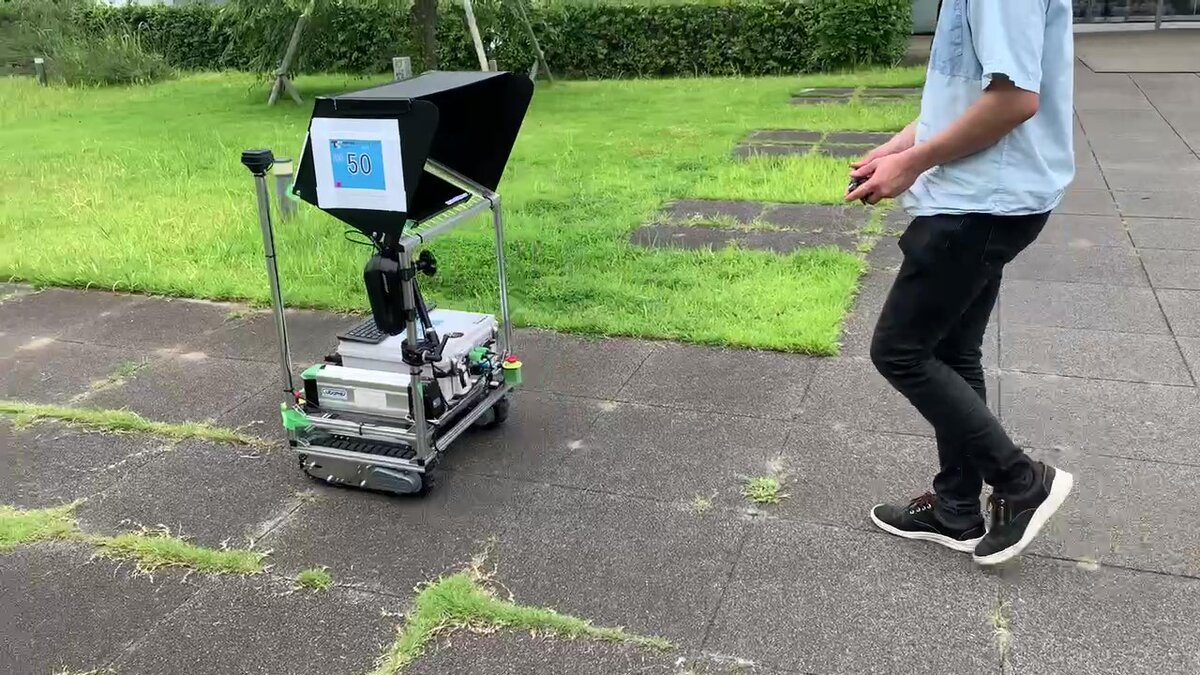
つくばチャレンジ2023 第1回目の実験走行が07/15(土)に開催されました。CuboRexは初めての参加でしたので、まずはセンサデータの収集を目的とし、プロポを用いた遠隔操作でコースを走行してきました。
CLASでは、準天頂衛星「みちびき」が配信している補強信号(GNSSでの測位における誤差を補正するデータ)を利用します。計測を行う機器は「みちびき」から補強信号を受け取り、そのデータをもとにGNSSの測位結果を補正することで、通常のGNSSでの測位より誤算の少ない測位結果が取得できます。ロボット内部ではGNSSによる位置情報と補強信号から、現在位置を計算する必要があります。
この補強信号を十分に受信したうえで、cm精度で位置情報を特定できた解を一般的にFIX解と表現します。このFIX解を算出するためには、ある程度の期間連続して測量を行い、測量結果の妥当性を検証する必要があります。正確な位置情報を算出するための検証を行っている最中であったり、十分に情報を受信できているもののcm精度までは位置情報を特定できていない状態で算出された解をFLOAT解と表現します。
※FIX条件を満たした場合の、移動体の測位精度:水平方向12cm 鉛直方向24cm
参照:内閣府 宇宙開発戦略推進事務局
 Map data ©2023 Google
Map data ©2023 Google
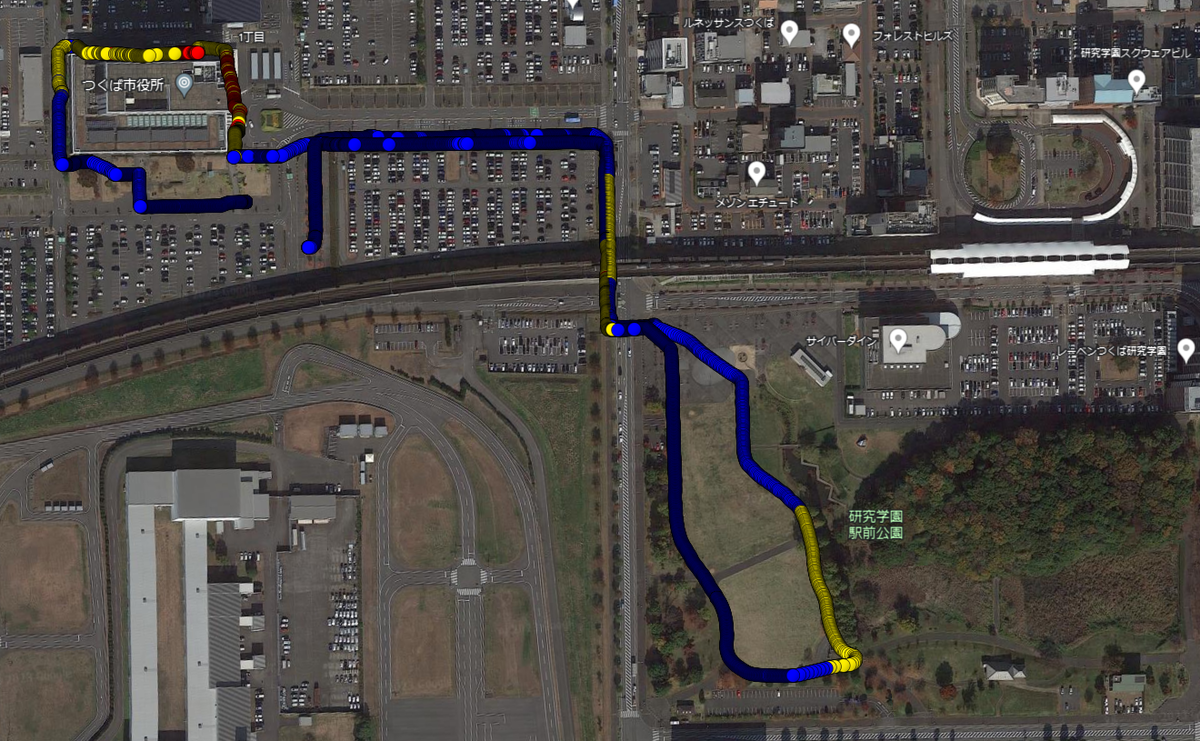
上の図はつくばチャレンジのコースをプロポで操作して走行した経路と、その時のCLASのFIX状況を5Hzで地図にプロットしたものです。青色の箇所ではcm精度の計測に十分な情報を取得できており、FIX解を算出できている箇所です。黄色はFLOAT解を算出した箇所、赤色の箇所ではFLOAT解も算出できなかった(CLASによる補強信号を受信できなかった)箇所を示しています。
 左:つくば市役所の駐輪場 / 右:つくば市役所エントランス
左:つくば市役所の駐輪場 / 右:つくば市役所エントランス
つくば市役所の北側では、駐輪場横の通路やエントランスを通ります。屋根があるため十分に補強信号を受信できず、FLOAT解も算出できていませんでした。このような場所では自己位置推定をGNSSのみで行うことは難しいので、エンコーダやIMUによる補助を行い次の目的地を目指します。LIDARやデプスカメラを使用した障害物の回避も平行して行います。
床面に関しては、駐輪場横の通路はタイルが敷き詰められており、エントランスには点字ブロックが配置されています。タイルの継ぎ目にある溝や点字ブロックの凸部は、一般的に平らな床面での使用を想定されたロボットでは走行に支障をきたす可能性があります。具体的には車輪が引っかかり直進できなかったり、エンコーダによる自己位置推定がずれたりするなどが懸念されます。不整地を想定されたCuGoのクローラは、今回の走行会では引っかかりによる影響はほとんど受けず走行することができました。

コースの中にはつくば市役所の駐車場出入り口を横切る歩道があります。歩道→車道、車道→歩道の境目には段差があります。つくば市役所の周りはバリアフリー化が進んでおり段差はかなり低くなっているものの、自律移動ロボットにとって段差は転倒やスタックの危険性がある障害です。ROS開発キットで使用しているCuGo V3は9cmまで段差乗り越えが可能で、今回の走行会も転倒・スタックなく段差の乗り越えができました。
 Map data ©2023 Google
Map data ©2023 Google
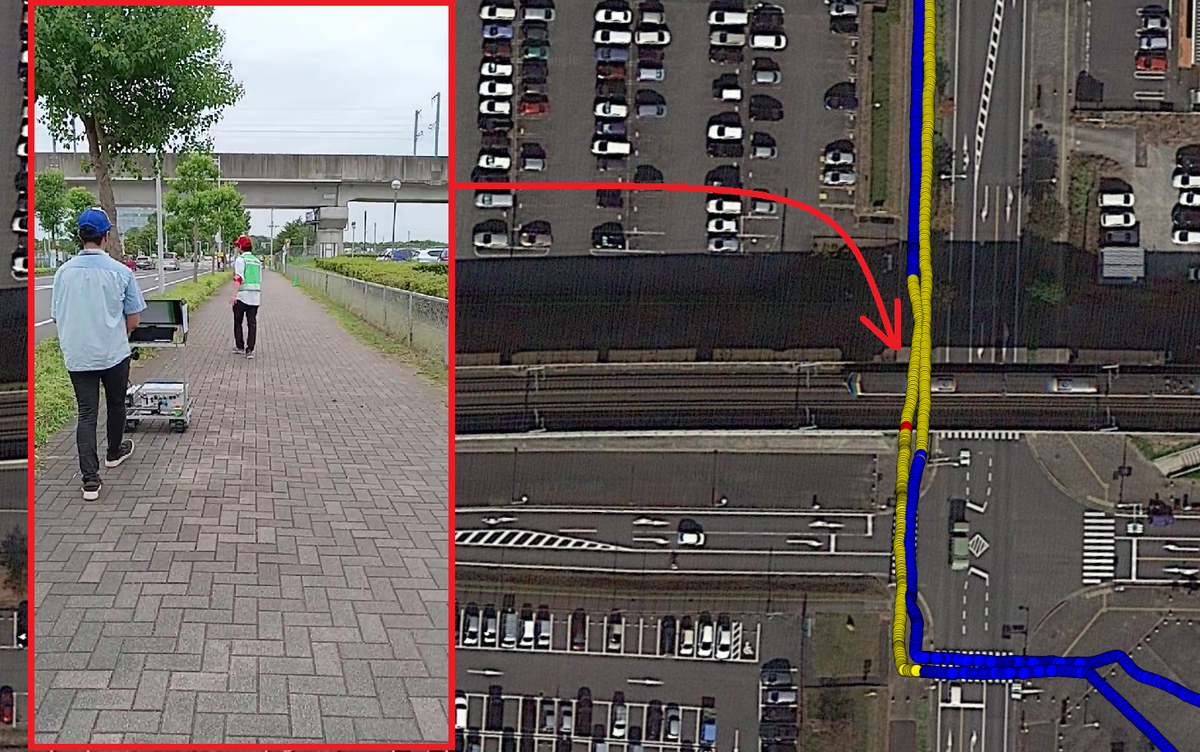
つくば市役所から研究学園駅前公園に向かう道の上には高架がかかっており、つくばエクスプレスが走っています。この高架下に入るとFIX解が算出できず、FLOAT解が算出されました。上図左側の経路では、FLOAT解も得られていないタイミングが1秒ほど存在します。しかし、高架下を抜ければFLOAT解を得られるので、補強信号が全く受信できない区間は少ないと考えられます。さらにFLOAT解でも車道にはみ出る等の大きく位置がずれるようなことは起きませんでした。こちらもエンコーダとIMUにより自己位置推定を補助することで、自己位置の精度を大きく損なうこと無く移動ができるかと思われます。
ロボットは研究学園駅前公園内の遊歩道で折り返し、ゴール地点に向かいます。今回は公園の中も問題なく走行できましたが、雨天時にはぬかるみが発生したり、秋~冬になると落ち葉や積雪など路面状況が大きく変わりそうに感じました。
ROS開発キットにはCuGo V3を使用していますが、CuboRexではCuGo V3上位機種としてCuGo V4も販売しております。高度な防水性能や走破性を要求される場合には、CuGo V4を使用することも検討する必要がありそうです。CuboRexではCuGo V4を使用したROS開発キットも開発予定です。
実験走行を終えて
つくば市はバリアフリー化が非常に進んでおり、CuGoでは非常に走りやすい床面と感じました。不整地を専門としているCuboRexとしては一般的な市街くらいは問題なく走れるだろうと踏んでいましたので、安心できる結果だったと感じています。
自律走行に関してはこれから開発を進めていく部分になりますが、ひとまず良好なセンサデータが取得できたことが大きな成果でした。次回のレポートでは自律走行について具体的な内容をレポートできるよう、今回取得したセンサデータを利用して開発を進めていきます。
お問い合わせ
CuboRexでは、いままでロボットがうまく立ち入れなかった不整地環境で役に立つロボットを開発しています。より詳しい情報を知りたい方は以下までお気軽にお問い合わせください。
ROS開発キットの詳細情報についてはこちらをご覧ください。
お求めの場合は、上記お問い合わせにお願いいたします。
https://prtimes.jp/main/html/rd/p/000000057.000022568.html
また、このプロジェクトではROS開発キットという製品を使用していますが、クローラロボット開発プラットフォームにセンサやPCを追加することで同様な自律走行をすることも可能です。ぜひご覧ください。